



스탬핑/스태킹 로봇 SDCX RMD-300/200/160/120/35/08/110/20/50
기술적 매개변수
| 모델 번호 | 자유도 | 운전 모드 | 탑재량(KG) | 반복 위치 정확도(mm) | 동작 범위(°) | 최대 속도(°/s) | 손목의 허용 하중 관성(kg·m2) | 순환 비트(주기/시간) | 운동 반경(mm) | 지역적 무게 (킬로그램) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC 서보 드라이브 | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | AC 서보 드라이브 | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | AC 서보 드라이브 | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | AC 서보 드라이브 | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | AC 서보 드라이브 | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | AC 서보 드라이브 | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | AC 서보 드라이브 | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800① | 1433 | 180 |
비고:
① 시험 트랙은 높이 150mm, 너비 1000mm이며, 실제 사이클 시간은 실제 작업 조건에 따라 영향을 받습니다.
② 시험 트랙은 높이 200mm, 너비 1000mm로 실제 사이클 시간은 실제 작업 조건에 따라 영향을 받습니다.
③ 시험 트랙은 높이 400mm, 너비 2000mm로 실제 사이클 시간은 실제 작업 조건에 따라 영향을 받습니다.
인화성, 폭발성, 부식성 가스 및 액체와의 접촉을 피하십시오. 물, 기름, 먼지가 튀지 않도록 하십시오. 전기적 잡음원(플라즈마)에서 멀리하십시오.
동작 범위
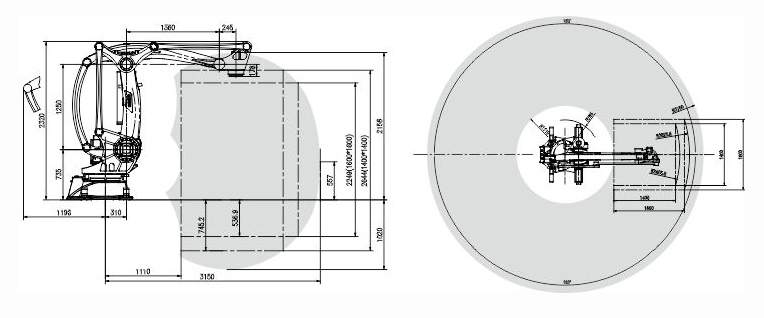
SDCX-RMD300/200/160/120의 모션 범위 플롯
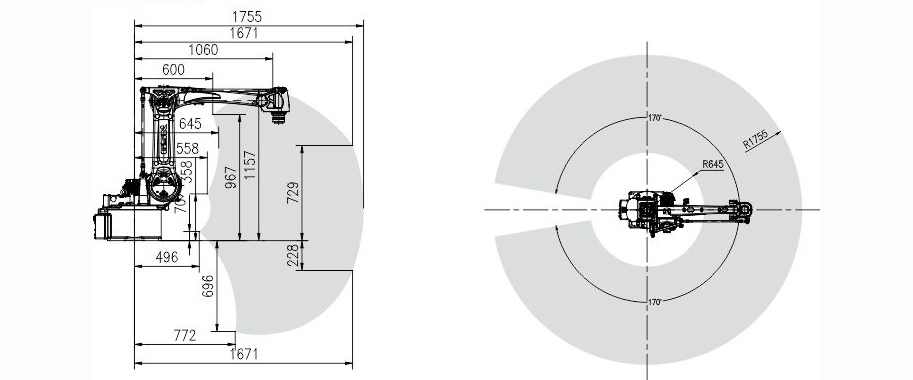
SDCX-RMD20의 모션 범위 플롯
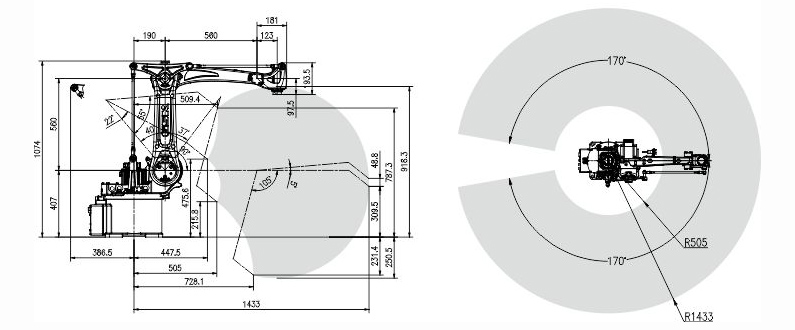
SDCX-RMD08의 동작 범위 플롯
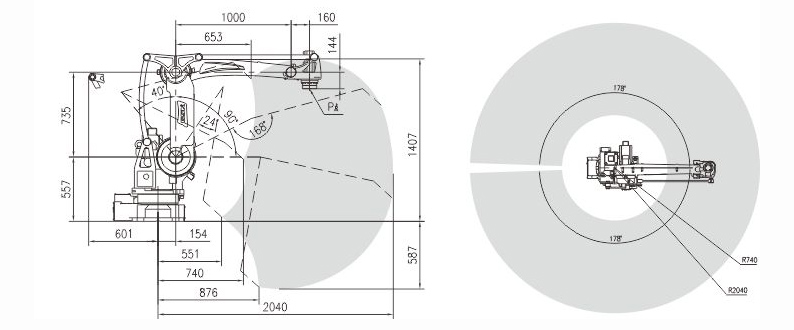
SDCX-RMD50의 모션 범위 플롯
제품 응용 프로그램 디스플레이
솔루션
철강 코일 취급 프로젝트의 기술 계획












